Японский посадочный аппарат SLIM успешно вышел на лунную орбиту

SLIM (Smart Lander for Investigating Moon) — небольшой посадочный модуль, запущенный 7 сентября из Японии. С того дня он направился к Луне по длинной траектории, преодолев 1,5 25 декабря японское космическое агентство JAXA объявило, что манёвр по выведению на лунную орбиту прошел успешно.
Таким образом, SLIM находится на своей первой орбите вокруг нашего спутника, которую он будет изменять в ближайшие недели, чтобы приблизиться к лунной посадке, запланированной на 19 января в 18:00 по московскому времени.
SLIM - это третья миссия с такой целью, которая будет запущена в период с июля по сентябрь, после "Луны-25" и "Чандраяна-3". Цель японской миссии, как и индийской, — продемонстрировать технологии и процессы Японского космического агентства для успешного спуска на Луну.
На самом деле, Японии тоже никогда не удавалось правильно спуститься на поверхность нашего спутника. Полет SLIM был похож на попытку частного посадочного аппарата Hakuto-R компании ispace (также японской) в начале 2023 года, чья посадка на Луну не удалась из-за проблем с программным обеспечением при анализе и определении рельефа в апреле 2023 года.
Выход SLIM на лунную орбиту и дальнейшие шаги
SLIM вышел на лунную орбиту 25 декабря в 10:51 по московскому времени. Сейчас он находится на расстоянии 4000 км от аполуниума (самой удаленной от Луны точки орбиты) и 600 км от перилуниума (самой близкой точки). Эта траектория показана синим цветом на изображении ниже.
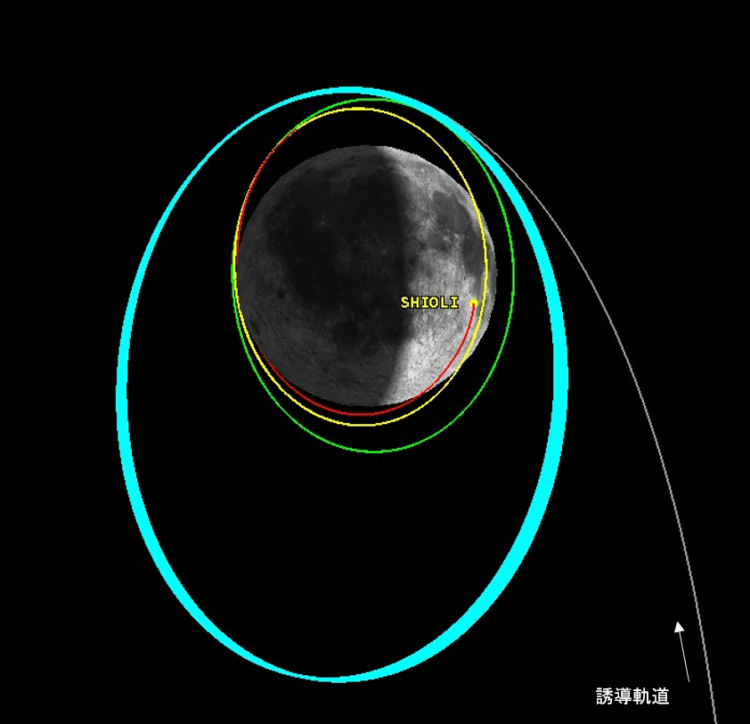
Зеленым цветом обозначен следующий пункт назначения SLIM - круговая орбита диаметром 600 км. Отсюда будут проведены все операции по подготовке к посадке. Когда посадочный аппарат будет готов, перилунар будет опущен до 15 км (красная линия), и когда SLIM пройдет эту точку, начнется манёвр по посадке на Луну.
Ожидается, что все это продлится 20 минут и произойдет с 18:00 до 18:20 по московскому времени 19 января.
Основная цель SLIM - продемонстрировать высокоточную мягкую посадку на Луну. Для этого будет использована навигационная система, основанная на наблюдении за поверхностью в режиме реального времени и подкрепленная наблюдениями с японского спутника SELENE, который находится на орбите Луны с 2007 года.
SLIM оснащен многодиапазонной камерой (MBC) для оценки состава кратера Shioli путем анализа спектров солнечного света, отраженного от его поверхности. Цель — поиск присутствия минерала оливина, который, возможно, был выброшен из лунных недр.
На борту SLIM также находится пара небольших роверов. Lunar Excursion Vehicle 1 (LEV-1) использует прыгающий механизм, а LEV-2 представляет собой сферический ровер размером с бейсбольный мяч. Оба аппарата оснащены камерами и научными приборами.