В Китае разработали миниатюрный датчик позволяющий роботам ощущать прикосновения
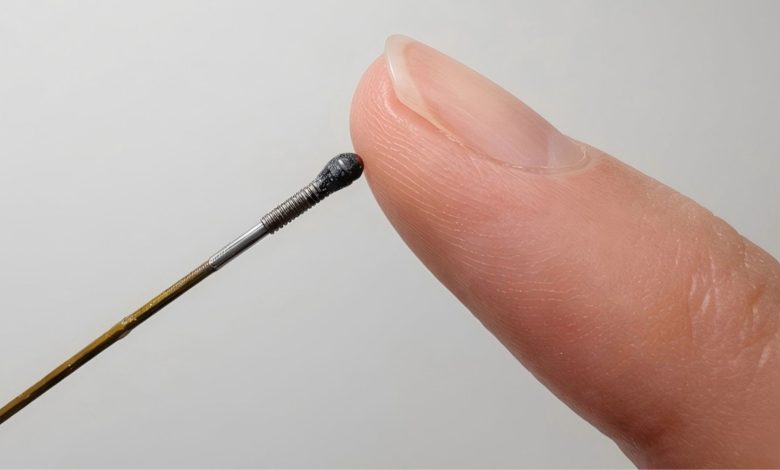
Китайские исследователи создали миниатюрный оптический сенсор размером с рисовое зерно, который способен наделить хирургических роботов чувством осязания в режиме реального времени. Устройство измеряет силу, давление и скручивание во всех направлениях, используя свет вместо традиционной электроники. По словам разработчиков, новая технология может сделать роботизированные операции более безопасными и точными, особенно при проведении процедур в крайне ограниченном пространстве.
Разработка принадлежит специалистам из Shanghai Jiao Tong University. Размер сенсора составляет всего 1,7 миллиметра. Исследователи отмечают, что такой датчик позволит роботам быстрее обнаруживать опасный контакт с тканями во время сложных медицинских вмешательств и мгновенно корректировать свои действия. Кроме того, устройство продемонстрировало способность обнаруживать скрытые структуры под мягкими материалами, включая объекты, имитирующие опухоли внутри тканевых моделей.
Современные системы роботизированной хирургии в основном опираются на визуализацию, однако они практически не способны ощущать физическое взаимодействие инструментов с тканями в узких хирургических пространствах. Существующие датчики силы при этом остаются слишком крупными для установки в миниатюрные медицинские инструменты.
Руководитель исследовательской группы Цзяньлун Ян отметил, что современные системы визуализации способны четко показывать внутренние структуры организма, но не предоставляют информации о физическом контакте, такой как сила воздействия или крутящий момент. По его словам, существующие датчики силы часто оказываются слишком громоздкими или сложными для использования в компактных инструментах.
В основе новой технологии лежит оптическое волокно с мягким эластомерным наконечником. Когда наконечник касается объекта, он слегка деформируется, что изменяет распространение света внутри сенсора. Затем когерентный волоконный пучок передает световой рисунок на камеру, а система анализирует полученное изображение с помощью методов обработки данных, вычисляя силу и крутящий момент по всем направлениям.
Разработчики подчеркивают, что такая схема избавляет устройство от сложной системы проводки, характерной для традиционных миниатюрных сенсоров. В отличие от распространенных систем на основе волоконных брэгговских решеток, где для разделения различных компонентов силы используются многочисленные чувствительные элементы и сложные конструкции, новый сенсор оценивает общее состояние контакта за один этап измерения.
По словам исследователей, такой подход может значительно упростить создание компактных инструментов, которые одновременно смогут «видеть» и «чувствовать» окружающую среду. Во время испытаний устройство тестировали под контролируемыми нагрузками с заранее известными силами и вращательными движениями. Сенсор продемонстрировал стабильные и повторяемые измерения с низким гистерезисом, то есть показатели оставались точными как при увеличении нагрузки, так и при ее уменьшении.
Дополнительные испытания проводились на желатиновых моделях с жесткими сферическими объектами, имитирующими опухоли, скрытые под тканями. Сенсор успешно обнаруживал и определял расположение встроенных структур.
Авторы исследования считают, что технология может существенно улучшить тактильную обратную связь в малоинвазивной хирургии. Во время подобных операций роботы и инструменты работают через очень узкие каналы, где случайное прикосновение способно повредить чувствительные ткани.
Цзяньлун Ян подчеркнул, что роботизированные системы для малоинвазивной хирургии нередко используются в чрезвычайно ограниченных пространствах, например внутри глаза или в узких хирургических проходах. По его словам, повышение точности и безопасности инструментов позволит сделать деликатные медицинские процедуры более контролируемыми и снизить риск случайных повреждений тканей.
Следующим этапом работы исследователи называют повышение стабильности производства сенсоров и сокращение необходимости сложной калибровки перед коммерческим внедрением. Также команда планирует интегрировать устройство в медицинские и промышленные роботизированные системы для длительных испытаний в реальных условиях эксплуатации.
Кроме того, ученые намерены сосредоточиться на создании компактных систем, которые врачи и инженеры смогут легко использовать в практической работе.
Исследование в журнале Optica.