Собака-робот научилась ходить самостоятельно за один час

Как рефлексы животных позволяют им научиться ходить за такое короткое время? Исследователи из Института интеллектуальных систем имени Макса Планка изучили этот вопрос. Однако для ответа на этот вопрос они использовали не биологию, а робототехнику. Для исследования они разработали робота, который мог научиться ходить всего за один час без предварительного обучения.
В результате был создан "Морти", собака-робот, предназначенная для изучения развития ходьбы у молодых животных. "Исследование спинного мозга животного является сложной задачей. Но с помощью робота мы можем смоделировать его", — объясняет Александр Бадри-Спрёвиц, соавтор публикации, в заявлении Института. Исследование было опубликовано в журнале .
Конечно, ученые уже многое знают о двигательной функции животных. Как отмечается в пресс-релизе, животные рождаются с сетями мышечной координации, встроенными в спинной мозг. Поэтому они очень быстро учатся ходить, спасаясь от хищников. Поначалу они полагаются на эти несколько базовые данные, но они позволяют им начать движение. Позже они учатся более точно координировать работу своих мышц и сухожилий. Их движения постепенно становятся более плавными, но для этого нужна практика.
Ученые утверждают, что эти два этапа обусловлены двумя механизмами. У людей и животных существуют так называемые "центральные генераторы паттернов" (ЦГП) - сети "нейронов" в спинном мозге, которые производят периодические сокращения мышц без вмешательства мозга. Этот механизм используется для выполнения высокоповторяющихся задач, таких как моргание, ходьба и т.д. Это базовые задачи, которые не требуют подключения к мозгу. В дополнение к этому в игру вступают "рефлексы". Это непроизвольные двигательные действия, объясняют ученые, которые также напрямую связаны со спинным мозгом, а не с головным.
Если говорить конкретно, то центральный генератор паттернов работает на ровной поверхности без препятствий. Рефлексы срабатывают при появлении чего-то необычного, углубления, толчка и т.д. У новорожденного животного ЦПГ изначально еще плохо приспособлены, и животное спотыкается, будь то на ровной или неровной поверхности. Со временем он узнает, как его рефлексы и "основные паттерны" управляют его движениями, и совершенствуется. Другими словами, опыт работы в поле постепенно корректирует ранее существовавшие данные о ходьбе. Однако узнать подробности этого функционирования не так-то просто. Поэтому ученые решили использовать робототехнику.
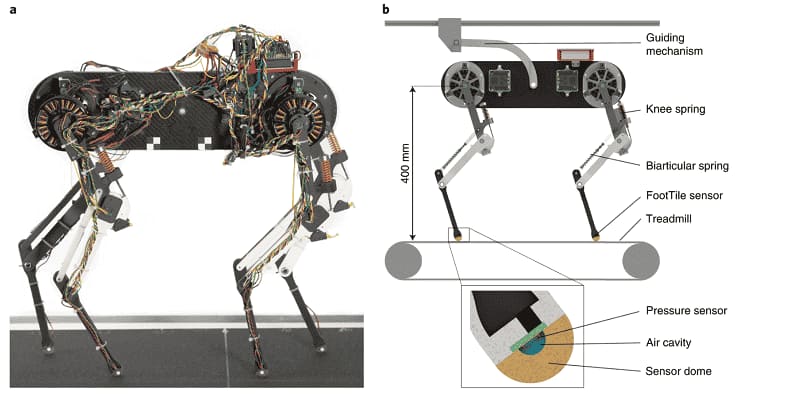
"Как инженеры и робототехники, мы искали ответ на этот вопрос, создав робота, который обладает рефлексами, как животное, и учится на своих ошибках", — объясняет Феликс Рупперт, один из авторов работы. Поэтому они соединили базовую программу с алгоритмом машинного обучения. Другими словами, они начали с создания виртуального "спинного мозга", который они прикрепили к голове робота-собаки. Исследователи не дали Морти никакой базовой информации о форме его тела, его двигателях, пружинах и т.д.
Таким образом, алгоритм обучения позволил сравнить воспринимаемую сенсорную информацию с базовой программой робота, чтобы постепенно улучшать его возможности. Созданная исследователями собака-робот оказалась способной научиться ходить так же, как и животные, и даже быстрее, чем животное, поскольку для достижения хорошей координации движений ей потребовался всего один час. В течение этого времени данные с датчиков стопы постоянно сравнивались с посадкой, предсказанной ЦГП робота. Когда робот спотыкался, алгоритм адаптировал скорость взмаха ноги, расстояние, продолжительность контакта с землей и т.д.
"Мы знаем, что эти ЦГП существуют у многих животных. Мы знаем, что рефлексы являются встроенными, но как объединить эти два понятия, чтобы животные обучались движениям с помощью рефлексов и ЦГП? Это фундаментальные исследования на стыке робототехники и биологии. Роботизированная модель позволяет нам ответить на вопросы, на которые не может ответить только биология", — говорят ученые.