Китайские инженеры создали роботов-пауков для мини-инвазивной эндоскопии
Китайские инженеры разработали мягких магнитных роботов, вдохновленных пауками, которые способны с высокой точностью проводить мини-инвазивные вмешательства в желудочно-кишечном тракте. Их конструкция позволяет с большей легкостью перемещаться внутри пищеварительной системы, в том числе по крутым поверхностям и в перевернутом положении, благодаря внешнему управлению с помощью магнитного поля, одновременно повышая комфорт для пациентов.
Заболевания желудочно-кишечного тракта, такие как рак, представляют собой значительную проблему для общественного здравоохранения в последние десятилетия. По данным ВОЗ, раковые опухоли пищеварительного тракта относятся к числу наиболее распространенных в мире, причем рак толстой кишки и желудка входит в первую пятерку по показателям заболеваемости и смертности. Последние исследования также сообщают о заметном росте случаев колоректального рака среди молодых взрослых.
В условиях отсутствия по-настоящему эффективных альтернативных методов терапии ранняя диагностика и вмешательство стали главным приоритетом биомедицинских исследований. Эндоскопия остается основной стратегией: она позволяет в реальном времени наблюдать состояние пищеварительного тракта и исследовать его протяженные участки. Однако эта техника остается инвазивной и зачастую дискомфортной для пациентов, поскольку предполагает введение гибкой трубки с камерой на конце через рот, анус или небольшой разрез. Кроме того, ей часто не удается достичь глубоких участков тракта из-за извилистых и неровных путей, затрудняющих продвижение.
В течение нескольких лет ведутся исследования по созданию миниатюрных мягких автономных роботов, чтобы преодолеть эти ограничения. Их гибкость и возможность дистанционного управления с помощью таких стимулов, как магнитные поля, могли бы позволить им достигать областей желудочно-кишечного тракта, недоступных для классических эндоскопов, одновременно снижая дискомфорт пациентов. Однако разработка мягких роботов для эндоскопии сталкивается с серьезными препятствиями, поскольку их перемещение варьируется в зависимости от отдела тракта из-за физиологических и структурных различий каждого органа.
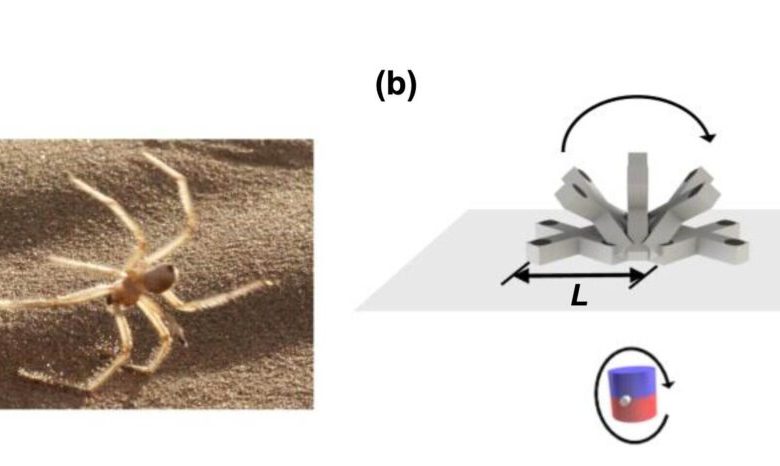
Чтобы решить эти задачи, команда исследователей из Университета Макао предложила новых мягких магнитных роботов, способных перемещаться в сложных средах под любыми углами, включая движение вверх ногами. Их движения вдохновлены пауком-колесом Carparachne aureoflava, известным своей способностью катиться по песку и неровной местности. Эти новые роботы созданы из мягких и пластичных материалов, что снижает риск повреждения внутренних тканей и обеспечивает лучший комфорт для пациентов. Они управляются двумя роботизированными манипуляторами, каждый из которых имеет шесть степеней свободы: один управляет движениями в реальном времени, а другой обеспечивает мониторинг их состояния. Манипулятор управления использует магнит, создающий вращающееся магнитное поле, которое вызывает вращательные движения у роботов. Такое магнитное управление позволяет создавать достаточную силу тяги для преодоления наклонных поверхностей под любым углом. Роботы способны преодолевать препятствия высотой до 8 сантиметров и перемещаться в средах, покрытых слизью. Они также оснащены визуальным эндоскопом для навигации к целевым зонам и могут выполнять такие функции, как целевая доставка лекарств. Для оценки производительности исследователи протестировали роботов на segments пищеварительного тракта умерших животных с характеристиками, близкими к человеческим. Результаты показали, что роботы достигли целевых областей, не повредив окружающие ткани. Следующим шагом станут испытания на живых животных, прежде чем рассматривать возможность клинических испытаний.