Инженеры Принстона создали мягкого робота, который движется с помощью тепла вместо моторов
Инженеры Принстонского университета создали новый класс мягких роботов, которые двигаются без использования моторов или громоздких внешних систем. Разработка объединяет в себе гибкие материалы со встроенной электроникой, что позволяет машинам изменять форму и выполнять контролируемые движения с помощью тепла.
Мягкие роботы уже давно рассматриваются как перспективное решение для применения в медицине, опасных исследовательских миссиях и при выполнении точных задач. Однако большинство существующих конструкций по-прежнему полагаются на жесткие компоненты или внешние воздушные насосы. Команда Принстона поставила цель устранить эти ограничения, интегрировав принцип действия непосредственно в материал.
Для создания роботов исследователи использовали специализированный 3D-принтер, изготавливая их из жидкокристаллического эластомера. Этот полимер обладает упорядоченной молекулярной структурой, что позволяет инженерам программировать его реакцию на нагрев. Ученые напечатали материал в виде зон с контролируемым молекулярным выравниванием. Эти зоны действуют как шарниры: при нагревании они изгибаются предсказуемым образом. Путем наложения и соединения таких зон команда создала структуры, которые складываются и разворачиваются по команде. Данный подход встраивает движение непосредственно в материал, а не добавляет механические сочленения позже. Кроме того, в процессе печати были интегрированы гибкие печатные платы, что исключило необходимость отдельной сборки и повысило надежность.
Встроенные цепи позволяют точно нагревать определенные участки, и этот нагрев вызывает сокращение полимера, которое и приводит к движению. Система включает датчики температуры, обеспечивающие обратную связь в реальном времени, что позволяет реализовать замкнутый цикл управления и помогает роботу сохранять точность при повторяющихся циклах. Для направления процесса складывания команда добавила легкие стеклопластиковые панели между шарнирами, которые гарантируют, что изгиб происходит только в заданных местах.
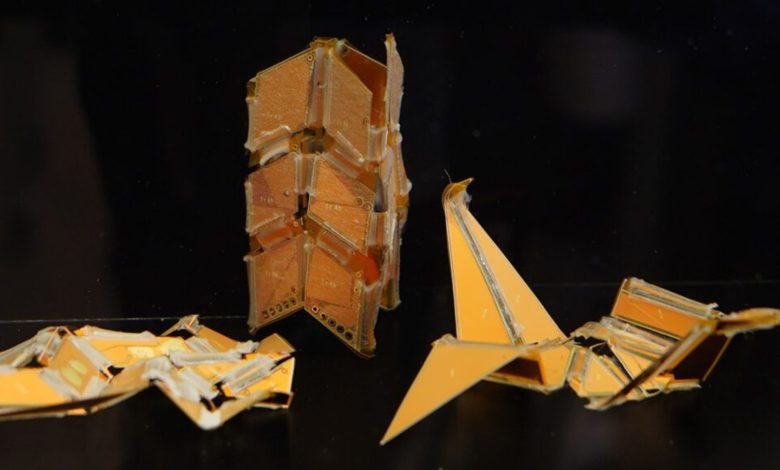
В качестве демонстрации исследователи построили робота в форме журавля, вдохновленного оригами. Эта конструкция взмахивает крыльями при подаче электричества и выполняет повторяющиеся движения без заметного износа. Команда использовала математические модели из дизайна оригами для программирования этих движений, а также подчеркнула важность коррекции ошибок: система использует обратную связь от датчиков, чтобы корректировать небольшие отклонения с течением времени, что повышает долговечность и стабильность работы.
Проект начинался как дипломная работа бакалавра Дэвида Бершадски, который учился на электротехническом факультете и окончил университет в 2024 году. Он искал способ легко и многократно создавать элементарные ячейки, способные менять форму в зависимости от объема. Бершадски сотрудничал с другими исследователями и присоединился к курсу по инжинирингу оригами, что определило направление проекта. Он описал свою работу как объединение дисциплин и отметил, что ключевым вкладом стала демонстрация интеграции сложной системы с локальным управлением нагревом. Он также разработал программный инструмент, позволяющий другим создавать аналогичных роботов. Несмотря на прогресс, самым сложным этапом оставалась именно системная интеграция, поскольку весь проект, по словам Бершадски, и представлял собой объединение множества различных технологий. Исследователи полагают, что их подход может привести к созданию масштабируемых и пригодных для производства мягких роботов, которые в будущем смогут работать внутри человеческого тела или в средах, слишком опасных для традиционных машин.
Исследование в журнале Advanced Functional Materials.