Человекоподобные роботы освоили паркур для эффективной навигации в реальном мире
Исследовательская группа из подразделения Amazon Frontier AI & Robotics (FAR) и Калифорнийского университета в Беркли (UC Berkeley) представила новую технологическую разработку, которая может кардинально изменить возможности современных человекоподобных роботов. Созданный ими фреймворк под названием PHP (Perceptive Humanoid Parkour, или «восприимчивый человекоподобный паркур») позволяет андроидам передвигаться с недостижимой ранее ловкостью, имитирующей человеческую. Благодаря этой системе роботы обретают способность не просто устойчиво ходить, но и бегать, прыгать и преодолевать различные препятствия как в городских условиях, так и на пересечённой местности.
В основе вычислительных моделей PHP лежат реальные записи спортивного паркура, который требует от участников использования широкого спектра физических навыков для быстрой навигации в сложной среде. Учёные отмечают, что предыдущие достижения в области локомоции человекоподобных роботов в основном ограничивались стабильной ходьбой по разным поверхностям, однако задача воспроизведения высокой динамики и адаптивности человеческих движений долгое время оставалась нерешённой. Новый подход призван заполнить этот пробел, обеспечивая не только робастность движений, но и выразительность, схожую с человеческой, а также способность к принятию решений на основе визуального восприятия.
Для создания фреймворка исследователи собрали видеоданные с участием людей, выполняющих различные динамические элементы паркура, после чего разбили эти сложные движения на более мелкие, атомарные действия. Комбинируя эти элементы, можно создавать плавные и сложные последовательности движений. Обучение контроллеров человекоподобного робота происходило с использованием извлечённых из набора видеоданных и методов обучения с подкреплением. На первом этапе нейросети обучались выполнять отдельные конкретные движения, а затем эти навыки были объединены в единую унифицированную систему управления.
Эта система, используя данные с камер, позволяет роботу самостоятельно планировать и координировать цепочки действий для наиболее эффективного преодоления препятствий. Ключевой особенностью PHP стала возможность автономного принятия контекстно-зависимых решений: полагаясь только на встроенные датчики глубины, робот может мгновенно выбирать, какое действие применить к препятствию — перешагнуть, взобраться на него, перепрыгнуть с опорой или скатиться — в зависимости от его геометрии и высоты.
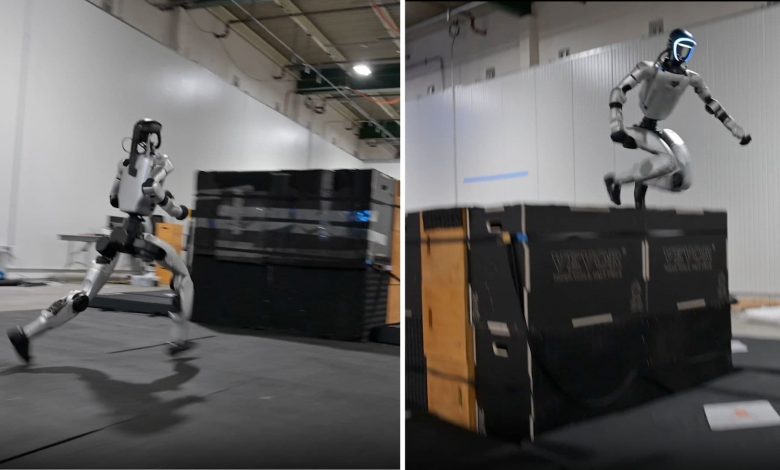
Практическую проверку своей разработки команда провела на человекоподобном роботе Unitree G1. Результаты экспериментов подтвердили высокую эффективность фреймворка. В ходе тестов робот продемонстрировал впечатляющие паркурные навыки в реальных условиях: он смог взбираться на препятствия высотой до 1,25 метра, что составляет 96 % от его собственного роста. Более того, андроид успешно преодолел серию из нескольких препятствий, адаптируя свои движения в реальном времени даже при неожиданных изменениях положения этих объектов. По словам авторов, их фреймворк, подробно описанный в статье на сервере , позволяет достичь желаемого уровня локомоции гораздо быстрее и эффективнее, а в ближайшее время разработка будет полностью открыта для сообщества.